
| Qingdao Institute of marine geology, China Geological Survey | Host |
| Citation: |
LI Zhitong, DONG Lingyu, LU Kai, SHAN Rui, ZHOU Jixiang. Research on underwater control technology of deep-sea towing system[J]. Marine Geology Frontiers, 2023, 39(3): 30-39. doi: 10.16028/j.1009-2722.2022.037

|
Research on underwater control technology of deep-sea towing system
-
Abstract
The deep-sea towing system is an important mean for mankind to develop and utilize the ocean. Among many types of deep-sea detection equipment, the deep-sea towing system has been widely used due to its advantages such as wide detection area, high operation efficiency, and good control performance. Aiming at the underwater control technology of deep-sea towing system, its development history and research status at home and abroad in two aspects: control means and control strategy were summarized and the advantages and disadvantages of different control means were analyzed and compared, and in the future research direction on the underwater control technology of deep-sea towing system was prospected, which will provide references for the application and development of deep-sea towing system.
-

-
References
[1] 丁忠军,任玉刚,张奕,等. 深海探测技术研发和展望[J]. 海洋开发与管理,2019,36(4):71-77. doi: 10.3969/j.issn.1005-9857.2019.04.016 [2] 陈鹰. 海洋观测方法之研究[J]. 海洋学报,2019,41(10):182-188. [3] 朱心科,金翔龙,陶春辉,等. 海洋探测技术与装备发展探讨[J]. 机器人,2013,35(3):376-384. [4] BEASLEY B, BEST C, DAVIS D. Design of flying eye remotely operated vehicle for deep water surveillance[J]. Ocean Conference Record (IEEE), 2000: 2075-2099. [5] 罗进华,朱友生,张宝平,等. 深拖系统在南海深水工程勘察中的应用[J]. 物探装备,2013,23(6):393-396. [6] 单瑞,董凌宇,杜凯,等. 超短基线定位系统在深拖探测中的应用[J]. 海洋地质前沿,2019,35(9):29-35. doi: 10.16028/j.1009-2722.2019.09006 [7] 徐建,郑玉龙,包更生,等. 基于声学深拖调查的海山微地形地貌研究:以马尔库斯-威克海岭一带的海山为例[J]. 海洋学研究,2011,29(1):17-24. doi: 10.3969/j.issn.1001-909X.2011.01.003 [8] 冯强强,温明明,牟泽霖,等. 声学深拖系统在海底冷泉调查中的应用[J]. 测绘工程,2018,27(8):49-52,59. doi: 10.19349/j.cnki.issn1006-7949.2018.08.009 [9] ALAN L,GRAEME S,BLAIR H,et al. Multi-dimensional water quality assessment of an urban drinking water source elucidated by high resolution underwater towed vehicle mapping[J]. Water Research,2016,93:289-295. doi: 10.1016/j.watres.2016.01.059 [10] CHOU Y C,WANG C C,CHEN H H,et al. Seafloor characterization in the southernmost Okinawa Trough from underwater optical imagery[J]. Terrestrial,Atmospheric and Oceanic Sciences,2019,30(5):717-737. doi: 10.3319/TAO.2019.03.14.01 [11] 刘晓东,赵铁虎,曹金亮,等. 用于天然气水合物调查的轻便型声学深拖系统总体方案分析[J]. 海洋地质前沿,2015,31(6):8-16. doi: 10.16028/j.1009-2722.2015.06002 [12] 王飞. 海洋勘探拖曳系统运动仿真与控制技术研究[D]. 上海: 上海交通大学, 2006. [13] VU H X, DAVEY S J, FLETCHER F K, et al. Track-before-detect for an active towed array sonar[C]//Proceedings of Acoustics 2013. Victor Harbor, Australia: Australian Acoustical Society, 2013: 1-7. [14] 金晓东. 水下拖曳系统水动力性能分析[D]. 广州: 华南理工大学, 2014. [15] NGUYEN T D, EGELAND O. Stabilization of towed cables[C]//Proceedings of the 43rd IEEE Conference on Decision and Control. Nassau: IEEE, 2004: 5059-5064. [16] ZHANG H T, GU H T, LIN Y, et al. Design and hydrodynamic analysis of towing device of the automated recovery of the AUV by the USV[C]//Proceedings of the IEEE International Conference on Information and Automation. Wuyi Mountain, China: IEEE, 2018: 416-421. [17] PEDERSEN E, SORENSEN A J. Modelling and control of towed marine seismic streamer cables[J]. IFAC Proceedings Volumes, 2001, 34( 7), 89-94. [18] 裴轶群. 深海拖曳系统运动性能分析与定高控制研究[D]. 上海: 上海交通大学, 2011. [19] 马伟,师子锋. 收放拖缆对拖体深度影响的仿真分析[J]. 水雷战与舰船防护,2012,20(3):67-69. [20] 李世振,魏建华,胡波,等. 主动式水下拖曳升沉补偿系统的非线性控制[J]. 中南大学学报(自然科学版),2018,49(3):612-617. doi: 10.11817/j.issn.1672-7207.2018.03.014 [21] 王海波,王庆丰. 水下拖曳升沉补偿系统设计及其内模鲁棒控制[J]. 机械工程学报,2010,46(8):128-132. [22] 王福贵,张强,梁顺安. 1000 hp主动钻井升沉补偿绞车的研制[J]. 机械工程师,2018(11):115-117,121. doi: 10.3969/j.issn.1002-2333.2018.11.038 [23] 王威,徐华源,孙波,等. 高分辨率多道地震勘探技术在南海天然气水合物调查中的应用[J]. 海洋地质前沿,2019,35(9):19-24. doi: 10.16028/j.1009-2722.2019.09004 [24] WINGHAM P J. Comparative steady state deep towing performance of bare and faired cable systems[J]. Ocean Engineering,1983,10(1):1-32. doi: 10.1016/0029-8018(83)90037-9 [25] 易杏甫,王岩峰,王成,等. 海洋监测拖曳系统中拖缆导流套设计[J]. 海洋工程,2005,23(4):120-124. doi: 10.16483/j.issn.1005-9865.2005.04.019 [26] 刘天威, 黄国梁. 拖缆导流套顺流性能及流体动力测试报告[R]. 上海: 上海交通大学, 1992. [27] 苑志江,金良安,田恒斗,等. 海洋拖曳系统的水动力理论与控制技术研究综述[J]. 科学技术与工程,2013,13(2):408-415,420. doi: 10.3969/j.issn.1671-1815.2013.02.029 [28] LI B B,HUANG W,LIANG H. An efficient method to assess effect of fin on the course stability of towing system[J]. Ocean Engineering,2020,217:108005. doi: 10.1016/j.oceaneng.2020.108005 [29] 褚宏宪,梅赛,史慧杰,等. 海洋短排列高分辨率地震拖缆沉放深度测试分析[J]. 海洋地质前沿,2020,36(12):65-71. doi: 10.16028/j.1009-2722.2020.003 [30] FORNARI,DANIEL J. A new deep-sea towed digital camera and multi-rock coring system[J]. EOS,Transactions American Geophysical Union,2003,84(8):69-76. doi: 10.1029/2003EO080001 [31] COLEMAN D F, NEWMAN J B, BALLARD R D. Design and implementation of advanced underwater imaging systems for deep sea marine archaeological surveys[C]//Proceedings of the OCEANS 2000 MTS/IEEE Conference and Exhibition. Providence: IEEE, 2000. [32] BALLARD R D, YOERGER D R, STEWART W K, et al. Argo/Jason a remotely operated survey and sampling system for full-ocean depth[C]//Proceedings of the OCEANS 91 Proceedings. Honololu: IEEE, 1991. [33] OTSUKA K, MOMMA H S, IIOTTA H. Jamstec/deeptow camera system[R]. Japan Marine Science and Technology Center, 1991. [34] ZHU J M. Deep ocean research activity in China[C]//Proceedings of the Eleventh International Offshore and Polar Engineering Conference. Stavanger, Norway: ISOPE, 2001. [35] 葛彤, 朱继懋. 6000米深海光学深拖系统升级改造课题研究报告[R]. 上海: 上海交通大学, 2009. [36] 苑志江,金良安,迟卫,等. 双三角翼型拖曳体定深特性的水动力实验研究[J]. 中国测试,2013,39(3):108-112. [37] 高国章,张家赫. 基于ADRC参数优化的拖曳式水下航行器定深控制分析[J]. 大连海事大学学报,2020,46(2):17-25. doi: 10.16411/j.cnki.issn1006-7736.2020.02.003 [38] ABBOTT I H, VON DOENHOFF A E. Theory of wing sections[R]. New York: Dover Publications, 1959. [39] GWYN G, POLLARD R. Modern tools for upper ocean surveys[J]. Journal of Naval Science. 1993, 18(1): 66-80. [40] SCHUCH E M, LINKLATER A C, LAMBETH N W, et al. Design and simulation of a two stage towing system[C]// Oceans. IEEE, 2005. [41] NAKAMULA M,KAJIWARA H,KOTERAYAMA W. Development of an ROV operated both as towed and self-propulseve vehicle[J]. Ocean Engineering,2001,28:1-43. doi: 10.1016/S0029-8018(99)00058-X [42] WOOLSEY C A, GARGETT A E. Passive and active attitude stabilization for a tow-fish[C]//Proceedings of the 41st IEEE Conference on Decision and Control. Las Vegas: IEEE, 2002. [43] DESSUREAULT J G. "Batfish" A depth controllable towed body for collecting oceanographic data[J]. Ocean Engineering, 1976, 3(2): 99-100, IN5-IN6, 101-111. [44] YAMAGUCHI S, KOTERAYAMA W, YOKOBIKI T. Development of a motion control method for a towed vehicle with a long cable[C]//Proceedings of the 2000 International Symposium on Underwater Technology. Tokyo: IEEE, 2000: 491-496. [45] YAMAGUCHI S, KOTERAYAMA W, YOKOBIKI T. Effects of unsteady lift and cable tension on design of a control system of a towed vehicle[C]//Proceedings of the 11th International Offshore and Polar Engineering Conference. Stavanger, Norway, 2001: 339-345 [46] 杨晓帆, 周凯. 拖曳式剖面探测拖体系统构成及运动控制试验[J]. 海洋工程, 2009, 27(3): 122~126. [47] 金晓东,吴家鸣. 多自由度控制水下拖曳体水动力响应分析[J]. 广东造船,2013,32(5):61-65. doi: 10.3969/j.issn.2095-6622.2013.05.038 [48] 孙烨,司先才,裴建新,等. 一种水下拖曳体的运动特性模拟研究[J]. 船舶工程,2018,40(增刊1):336-340. doi: 10.13788/j.cnki.cbgc.2018.S1.330 [49] TORE J,BERNT J. Numerical and experimental studies of submerged towing of a subsea template[J]. Ocean Engineering,2012,42:147-154. doi: 10.1016/j.oceaneng.2012.01.003 [50] 刘启帮. 水下高速拖体流体动力性能研究[D]. 北京: 中国舰船研究院, 2016. [51] WU J,CHWANG A T. Experimental Investigation on a Two-part Underwater Towed System[J]. Ocean Engineering,2001,28(6):735-750. doi: 10.1016/S0029-8018(00)00030-5 [52] GROSENBAUGH M A. Transient behavior of towed cable systems during ship turning maneuvers[J]. Ocean Engineering,2007,34(11):1532-1542. [53] 庞师坤,刘旌扬,王健,等. 二级深拖系统的回转运动特性[J]. 船舶工程,2017,39(9):71-77. doi: 10.13788/j.cnki.cbgc.2017.09.071 [54] 冯苏, 朱克强. 水下拖曳系统运动姿态仿真研究[J]. 海洋工程, 2005, 11(4): 56-63. [55] 庞师坤,刘旌扬,王健,等. 深海拖曳系统自稳定二级拖体姿态控制研究[J]. 船舶工程,2018,40(3):62-67. doi: 10.13788/j.cnki.cbgc.2018.03.062 [56] 郭军,冯强强,温明明,等. Teledyne Benthos TTV-301声学深拖系统在海底微地形地貌调查中的应用[J]. 测绘工程,2018,27(10):46-51. [57] 单晨晨,温明明,刘斌,等. 基于合成孔径声学深拖调查的海底浅表层流体活动研究:以SAMS DT6000深拖在琼东南海域调查为例[J]. 地球物理学报,2020,63(12):4451-4462. doi: 10.6038/cjg2020O0173 [58] 曹金亮,刘晓东,张方生,等. DTA-6000声学深拖系统在富钴结壳探测中的应用[J]. 海洋地质与第四纪地质,2016,36(4):173-181. doi: 10.16562/j.cnki.0256-1492.2016.04.020 [59] 中船. 青岛成功研发3000m级声学深拖系统[J]. 军民两用技术与产品,2016(1):30. doi: 10.19385/j.cnki.1009-8119.2016.01.045 [60] ABLOW C M,SCHECHTE R S. Numerical simulation of undersea cable dynamics[J]. Ocean Engineering,1983,10(6):443-457. doi: 10.1016/0029-8018(83)90046-X [61] 郑荣,辛传龙,汤钟,等. 无人水面艇自主部署自主水下机器人平台技术综述[J]. 兵工学报,2020,41(8):1675-1687. doi: 10.3969/j.issn.1000-1093.2020.08.022 [62] 李英辉,李喜斌,戴杰,等. 拖曳系统计算中拖缆与拖体的耦合计算[J]. 海洋工程,2002,20(4):37-42. doi: 10.3969/j.issn.1005-9865.2002.04.007 [63] da SILVA GOMES S,PINHEIRO GOMES S C. A new dynamic model of towing cables[J]. Ocean Engineering,2021,220:107653. doi: 10.1016/j.oceaneng.2020.107653 [64] CHAPMAN D A. The adjustment of fin size to minimize the ship induced pitching motion of a towed fish[J]. Ocean Engineering,1984,11:23-64. doi: 10.1016/0029-8018(84)90022-2 [65] GERLER M, HARGEN G L. Standard equations of motions for submarine simulation[R]. Washington: Technical Report DTMB 2510 David Taylor Research Center, 1967. [66] ABKOWITZ M A. Stability and motion control of ocean vehicles[M]. MA: MIT Press, 1969: 32-50. [67] SUN H B,CHEN G Q,LIN W J. A hydrodynamic model of bridle towed system[J]. Journal of Marine Science and Technology,2019,24(1):200-207. doi: 10.1007/s00773-018-0546-2 [68] 苑志江,金良安,迟卫,等. 海洋拖曳系统的船/缆/体耦合模型研究[J]. 船舶力学,2016,20(10):1252-1261. doi: 10.3969/j.issn.1007-7294.2016.10.005 [69] BUCKHAM B,NAHON M,SETO M,et al. Dynamics and control of a towed underwater vehicle system,part I model development[J]. Ocean Engineering,2003,30(4):453-470. doi: 10.1016/S0029-8018(02)00029-X [70] WATARU K, SATORU Y, TAKASHI Y, et al. Space-continuous measurements on ocean current and chemical properties with the intelligent towed vehicle“Flying Fish”[J]. IEEE Journal of Oceanic Engineering. 2000, 25(1): 130-138. [71] 卢祎斌,高占胜,金良安,等. 拖曳系统的水翼控制运动模型及仿真[J]. 指挥控制与仿真,2012,34(6):89-95. [72] 郑智林,苑志江,金良安,等. 舰船机动中拖曳系统建模与定深控制研究[J]. 兵器装备工程学报,2016,37(4):106-110. doi: 10.11809/scbgxb2016.04.026 [73] KATO N. Underwater towed vehicle maneuverable in both vertical and horizontal axis[J]. Journal of the Society of Naval Architects of Japan,1991(169):111-122. [74] KATO N. Guidance and control of underwater towed vehicle maneuverable in both vertical and horizontal axis[C]//Proc. Second Int. Offshore Polar Eng. Conf. US: ISOPE, 1992. [75] TEIXEIRA F C, AGUIAR A P, PASCOAL A M. Nonlinear control of an underwater towed vehicle[C]//7th IFAC Conference on Manoeuvring and Control of Marine Craft. Lisbon: IFAC, 2006. [76] GOBAT J I, Grosenbaugh M A. Time domain numerical simulation of ocean cable structures[J]. Ocean Engineering, 2006, 33: 1373-1400. [77] LEONARD J W, KARNOSKI S R. Simulation of tension controlled cable deployment[J]. Applied Ocean Research, 2001, 12(1): 34-42. [78] CAMPA G,WILKIE J,INNOCENTI M. Robust control and analysis of a towed underwater vehicle[J]. International Journal of Adaptive Control and Signal Processing,1988,12:689-716. [79] WU J M,CHWANG A T. Investigation on a two-part underwater maneuverable towed system[J]. Ocean Engineering,2001,28:1079-1096. doi: 10.1016/S0029-8018(00)00024-X [80] KATO N. Underwater towed vehicle maneuverable in both vertical and horizontal planes[C]//First International Offshore and Polar Engineering Conference. Edimburgh, UK, The International Society of Offshore and Polar Engineers, 1991: 85-92. [81] FRANCISCO C T,ANTÓNIO P A,ANTÓNIO P. Nonlinear adaptive control of an underwater towed vehicle[J]. Ocean Engineering,2010,37:1193-1220. doi: 10.1016/j.oceaneng.2010.05.010 [82] MINOWA A, TODA M. Motion control of towed underwater vehicles with movable wings using a high-gain observer based approach[C]. 2015 IEEE 10th Conference on. IEEE. US: IEEE, 2015: 1893-1898. [83] MINOWA A,TODA M. A high gain observer based approach to robust motion control of towed underwater vehicles[J]. IEEE Journal of Oceanic Engineering,2018(99):1-14. [84] 吴家鸣, 叶家玮. 自主稳定可控制水下拖体的设计及控制性能[J]. 华南理工大学学报. 2005, 33(5): 69-73. [85] 井安言,裴武波. 水下拖体姿态角自适应控制器设计[J]. 数字海洋与水下攻防,2019,2(4):80-86. [86] 井安言,佘湖清. 基于神经网络观测器的水下拖体输出反馈姿态控制[J]. 兵工学报,2020,41(12):2504-2513. doi: 10.3969/j.issn.1000-1093.2020.12.016 [87] 刘启帮,艾艳辉,王盟,等. 基于CFD仿真的导流缆侧漂分析[J]. 大连海事大学学报,2016,42(2):41-45. doi: 10.16411/j.cnki.issn1006-7736.2016.02.007 -
Access History

Figures(5)
Tables(1)

Export File
Citation
LI Zhitong, DONG Lingyu, LU Kai, SHAN Rui, ZHOU Jixiang. Research on underwater control technology of deep-sea towing system[J]. Marine Geology Frontiers, 2023, 39(3): 30-39. doi: 10.16028/j.1009-2722.2022.037
Format
Content
 DownLoad:
DownLoad:


-
Figure 1.
Classification of underwater control means for deep-sea towing systems
-
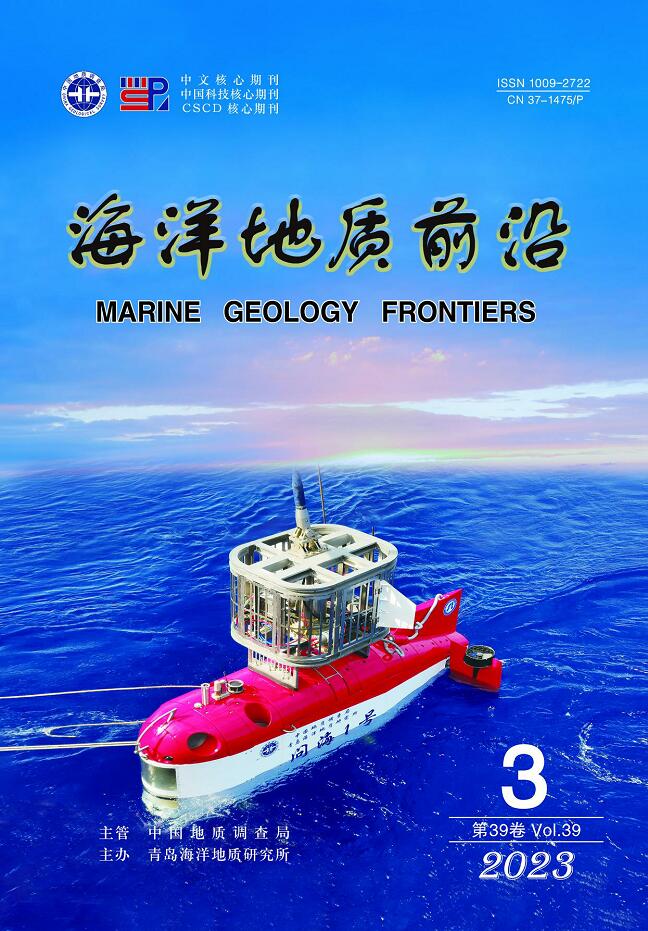
Figure 2.
Two streamer control means
-
Figure 3.
Deep-sea towing body with passive control means
-
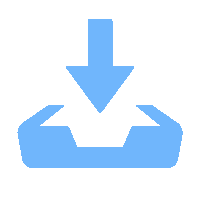
Figure 4.
Deep-sea towing body with active control means
-
Figure 5.
Two-stage deep towing system